utano
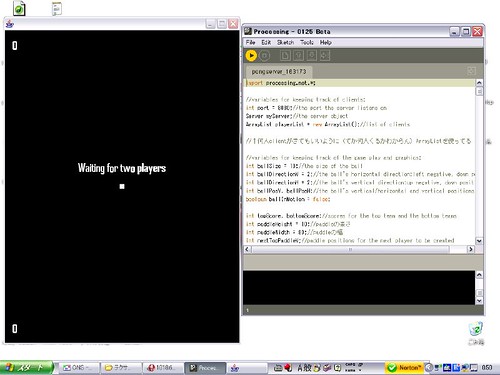
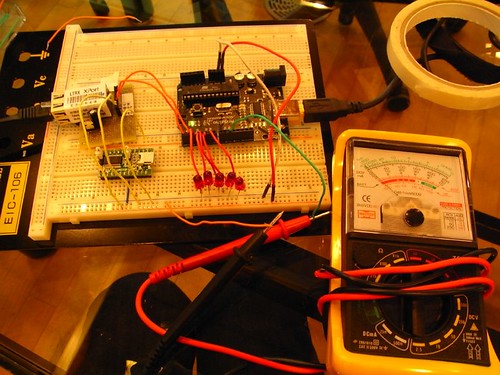
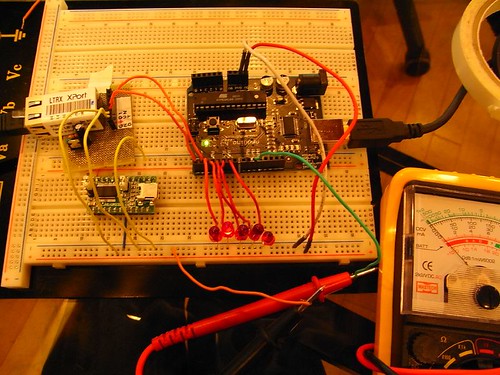
chapter4のvoltmeterのソースコードです。
一応コンパイルが通りました。
でも、void blink()のところがなんかきれいにブログで出なかったので
そこは本をみて調整してください。
つかHTMLタグとかがブログにアップするときにひっかかるので…
//Defines for the program's status (used for status variable):
#define disconnected 0
#define connecting 1
#define connected 2
#define requesting 3
#define reading 4
#define requestComplete 5
//Defines for I/O pins:
#define connectedLED 2 //indicates when there's a TCP connection
#define requestingLED 3 //indicates a HTTP request has been made
#define readingLED 4 //indicates a device is reading HTTP results
#define requestCompleteLED 5 //indicates a successful read
#define programResetLED 6 //indicates reset of Arduino
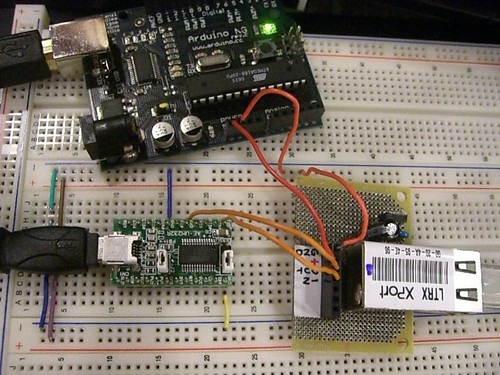
#define deviceResetPin 7 //resets Lantronix Device
#define meterPin 11 //controls VU meter; has to be one of thePWM pins 9-11
//Defines for voltmeter
#define meterMax 130 //max value on the meter
#define meterScale 150 //my meter reads 0-150
//variables
int inByte = -1; //incoming byte from serial RX
char inString[32]; //string for incoming serial data
int stringPos = 0; //string index counter
int status = 0; //Lantronix device's connection status
long lastCompletionTime = 0;//counter for delay after last completion
void setup(){
//set all status LED pins and Lantronix device reset pin:
pinMode(connectedLED, OUTPUT);
pinMode(requestingLED, OUTPUT);
pinMode(requestCompleteLED, OUTPUT);
pinMode(programResetLED, OUTPUT);
pinMode(deviceResetPin, OUTPUT);
pinMode(meterPin, OUTPUT);
//start serial port, 9600 8-N-1
Serial.begin(9600);
//reset Lantronix device
resetDevice();
//blink reset LED
blink(3);
}
//Take the Lantronix device's reset pin low to reset it
void resetDevice(){
digitalWrite(deviceResetPin, LOW);
delay(50);
digitalWrite(deviceResetPin, HIGH);
//pause to let Lantronix device boot up
delay(2000);
}
//Blink the reset LED
void blink(int howManyTimes){
int i;
for(i=0; i
digitalWrite(programResetLED, HIGH);
delay(200);
digitalWrite(programResetLED, LOW);
delay(200);
}
}
void loop(){
stateCheck();
setLEDs();
}
void stateCheck(){
switch(status){
case disconnected:
//attempt to connect to the server
deviceConnect();
break;
case connecting:
//until you get a C, keep trying to connect: read the serial port
if(Serial.available()){
inByte = Serial.read();
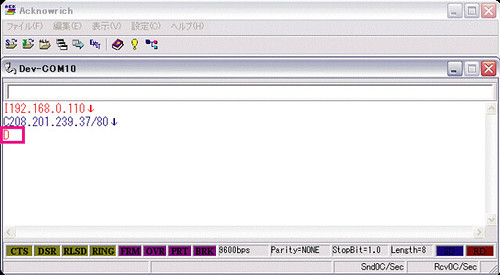
if(inByte == 'C'){ //'C' in ASCII
status = connected;
}
else{
//if you got anything other than a C, try again
deviceConnect();
}
}
break;
case connected:
//send HTTP GET request for CGI script
httpRequest();
break;
case requesting:
lookForData();
break;
case reading:
readData();
break;
case requestComplete:
waitForNextRequest();
}
}
void deviceConnect(){
//send out the server address and wait for a "C"byte to come back.
//fill in your serves numerical address below
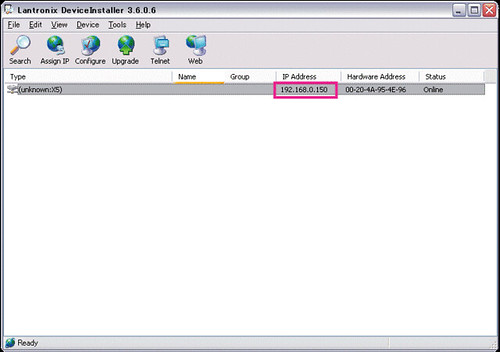
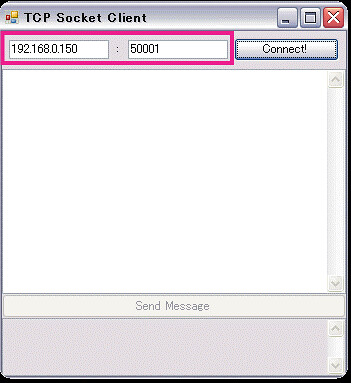
Serial.print("C192.168.0.150/80\n");
status = connecting;
}
void httpRequest(){
//make sure you've cleared the last byte from the last request
inByte = -1;
//reset the string position counter
stringPos = 0;
//make HTTP GET request and fill in the path to your version of the CGI script
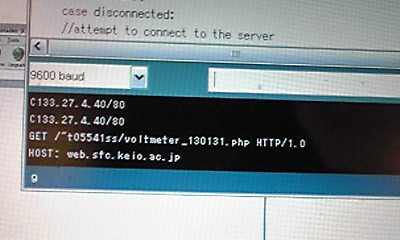
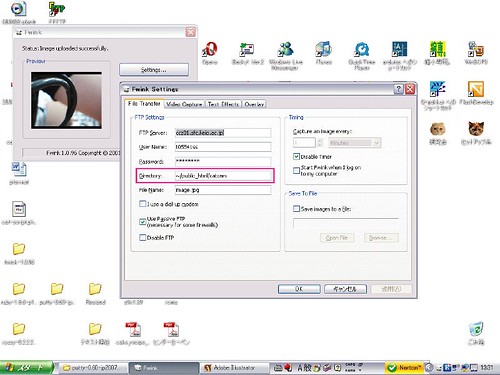
Serial.print("GET /~t05541ss/public_html/voltmeter_130131.php HTTP/1.0\n");
//fill in your server's name
Serial.print("HOST:web.sfc.keio.ac.jp\n\n");
//update the state of the program
status = requesting;
}
void lookForData(){
//wait for bytes from server
if(Serial.available()){
inByte = Serial.read();
//if you get a "<", what follows is the air quality index. you need to read what follows "<"
if(inByte == '<'){
stringPos = 0;
status = reading;
}
}
}
void readData(){
if(Serial.available()){
inByte = Serial.read();
//keep reading until you get a ">"
if(inByte !='>'){
//save only ASCII numeric characters (ASCII 0-9)
if((inByte >= '0') && (inByte <= '9')){
inString[stringPos] = inByte;
stringPos++;
}
}
//if you get a ">" you've reached the end of the AQI reading
else{
interpretResults();
}
}
}
void interpretResults(){
//convert the string to a numeric value
int airQuality = atoi(inString);
//set the meter appropriately
setMeter(airQuality);
lastCompletionTime = millis();
status = requestComplete;
}
void setMeter(int desiredValue){
int airQualityValue = 0;
//if the value won't peg the meter, convert it to the meter scale and send it out
if(desiredValue <= meterScale){
airQualityValue = (desiredValue * meterMax/meterScale);
analogWrite(meterPin, airQualityValue);
}
}
void waitForNextRequest(){
if(millis() - lastCompletionTime >= 120000){
//reset Lantronix device before next request
resetDevice();
status = disconnected;
}
}
void setLEDs(){
/* Except for the disconnected and connecting states,
all the states of the program have corresponding LEDs.
so you can use a for-net loop to set them by turning them all off except for the one that has
the same number as the current program state
*/
for(int thisLED = 2; thisLED <= 5; thisLED++){
if(thisLED == status){
digitalWrite(thisLED, HIGH);
}
else{
digitalWrite(thisLED, LOW);
}
}
}








 部屋で寝てたくまを引っ張って来てやった!
部屋で寝てたくまを引っ張って来てやった!



{kind=link}